記事公開日
最終更新日
シリコーン薄膜の誘電エラストマー型人工筋肉への適用

イントロダクション
ELASTOSIL ® FILMは、シリコーンゴムより作られる画期的な新規製品である。この20~400μmで精密に制御された膜厚を有するシリコーン薄膜は、溶媒を使用せずにクリーンルーム内で製造される。この特許化された製法により、正確な厚みの非常に均一な薄膜を提供することができる。
ELASTOSIL ® FILMはシリコーンゴムの特性に加え、薄膜の形状により、これまで商業的規模での実施が非常に困難であった用途を可能にする。人体への影響が少なく、化学的に不活性であり、ガスと水蒸気に透過性が高いため、包装用や創傷ケア用の保護フィルム、ガス分離膜または濃縮膜、ガス透過性の包装および保護膜といった機能性膜に展開が可能である。
その中でもELASTOSIL ® FILMの将来的な用途として最も注目されているのが、誘電エラストマー型人工筋肉である。
1.誘電エラストマー型人工筋肉
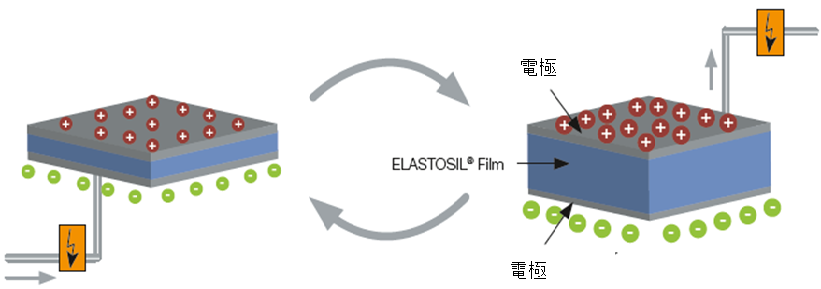
電場応答性高分子(EAP:Electro Active Polymer)の一種である、誘電エラストマー型人工筋肉は、高誘電率材料の薄膜の両面に電極を塗布した、いわば、自在に伸縮するコンデンサーである。この誘電エラストマー型人工筋肉は、アクチュエータ、センサー、発電素子として利用できる。
アクチュエータとしてみた場合、現行のアクチュエータの代表であるモーターが、不得意とする物体の伸縮による動きを簡単に実現できる。具体的な用途としては、玩具、電気リレー、義肢やぜん動ポンプが挙げられる。例えば、誘電エラストマー型人工筋肉を採用すると、モーターよりも自然な動きを実現することが予想できる。このため、特にロボットの分野において有効なアクチュエータとして期待されている。
誘電エラストマー型人工筋肉は電圧を印加して主体的に変形させるとアクチュエータであるが、逆に人工筋肉を変形させると電力を発生する。このため、誘電エラストマー型人工筋肉は、センサーや発電素子として利用が期待されている。
誘電エラストマー型人工筋肉の誘電体の材料として、以下のような特性を有するシリコーンは有望視されている。
- 誘電損失が小さい。
- 電気絶縁性(絶縁破壊強さ、体積抵抗率)に優れる。
- 弾力に富み粘性によるエネルギーロスが小さい。
- ゲルのように小さな弾性率の調整が容易である。
- 物理的、電気的特性の温度に対する変化率が小さい。
- 150℃以上の高温でも材料が安定である。
- -40℃の低温でも柔軟性を保つ。
- 吸湿しにくい。
数ある工業材料の中でも、均一な厚さを有するシリコーン薄膜であるELASTOSIL ® FILM は誘電エラストマー型人工筋肉の誘電体として、最適な製品と言える。ELASTOSIL ® FILMの両面に電極を作成し、電圧を印加する回路を取り付ければ、誘電エラストマー型人工筋肉ができあがる。

2.波力発電への応用:将来のエネルギー源として波の利用
海岸に打ち寄せる波は2010年に全世界で生産されたエネルギーよりも多くのエネルギーを保有している。ドイツ連邦教育研究省が主催する共同研究プロジェクトでは、波の運動エネルギーを電気エネルギーに変換し、有効利用する方法を検討している(図2)。
波力を電力に変換する波力発電の分野において、重要な役割を果たそうとしている。ドイツ連邦教育研究省(BMBF)の推進するプロジェクトの一つとして、ロバート·ボッシュ社のコンソーシアム(R&D)は、波力発電の基本原理を開発中である。Wacker Chemie AGは、プロジェクトメンバーとしてシリコーン薄膜およびこれに関連する製造プロセスの開発を担当している。
ブイに接続された発電装置の中では何千ものELASTOSIL ® Filmの層が圧縮と緩和を波の力で繰り返します。
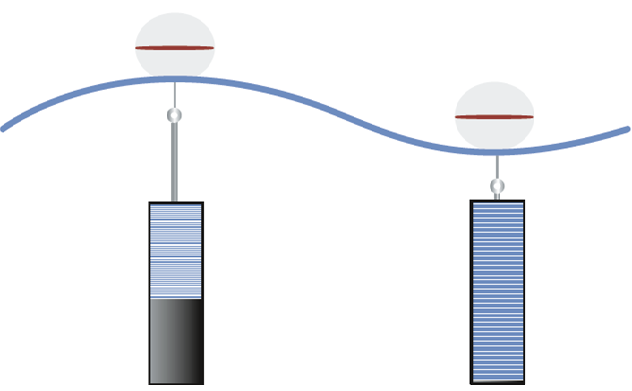
ELASTOSIL ® FILMを使用した最初の実物大ミニチュアモデルは2014年にハンブルグ工科大学で作られた。海底に配置されたエネルギー変換器(発電素子)の中心となるスタックには、何千枚ものELASTOSIL ® FILM が使用されている。それぞれが導電層(電極)を有し、相互に接続されている。波の作用により、ELASTOSIL ® FILMは押圧され、互いに近接する2つの電極の距離が小さくなる。 一定の電圧下における、この外部からの応力により、電極の一方は、正に帯電し、他方は負に帯電する。波が引くとELASTOSIL ® FILMの薄膜にかかる応力は緩和し、再び電極間距離が大きくなる。このようにして、波の運動エネルギーは電気エネルギーに変換される(図3)。
電極は波頭で帯電し、波の谷で電気を放出する。ELASTOSIL ® FILMは数百万サイクル以上の耐久性がある。
3.センサーとしての利用:スマート衣料
最も実用化および量産化が進んでいるのはセンサーとしての利用である。 ELASTOSIL ® FILMはデンマークのLEAP technology社によって、ウェアラブルなセンサー部品に加工され、スマート衣料の心臓部として活躍している。
スマート衣料はセンサー機能を有する衣服である。技術の発展途上にあり、可能性は無限である。例えば、スマート衣料から得た身体動作情報により、ゲームにおける身体や手の動きのスクリーン上での再現、体操やヨガの指導、あるいは、運動療法による回復の数値化などが、様々な用途が期待されている。
2014年にスウェーデンで開催された電場応答性高分子(EAP)に関する国際的な会議であるEuroEAP 2014にてWacker Chemie AGとLEAP technology社は出会い、誘電エラストマー型人工筋肉に基づくセンサー部品の開発は大きく前進した。LEAP technology社はELASTOSIL ® FILMの表面に電極を作成して、電気配線を施した上に、さらに別のシリコーンゴムによって被覆し、回路を電気的な干渉から保護し、希望の形状に仕上げている。センサー部品は校正された後、エンドユーザーへと届けられる。

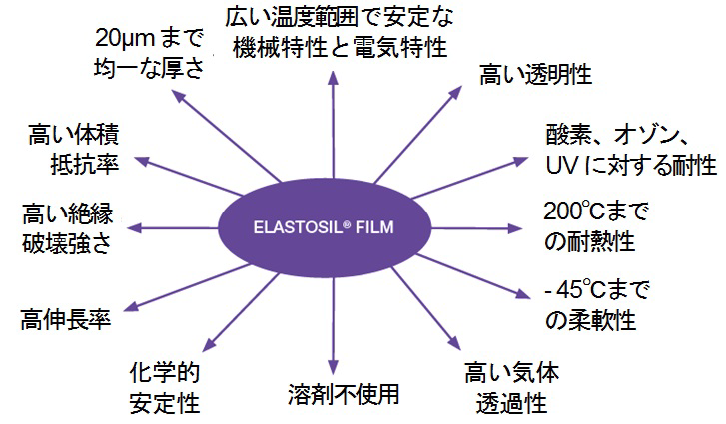
4.ELASTOSIL ® FILMの特徴
ELASTOSIL ® FILMは付加硬化型シリコーンゴムから特許化された製法で生産される人間の髪の毛よりも薄い薄膜である。種々のアプリケーションにおける要求を満たす純度の高い膜の作成のため、クリーンルーム条件下で製造される。薄膜の全幅と全長にわたって膜厚が±5%の精度で管理・製造される。
ELASTOSIL ® FILMは、シリコーンゴムの典型的な特徴の全てを有しており、優れた機械的物性を示す(表1)。さらに、ELASTOSIL ® FILMは膜としての次の特徴を有する。
- 膜厚が均一に制御されている。
- 膜の状態で供給される。
- ELASTOSIL® Filmカタログ
- キャリアフィルムがあり、ハンドリングが容易である。
このため、工業的に誘電エラストマー型人工筋肉によるアクチュエータ、センサー、発電素子を製造する際に非常に便利な材料である。
したがって、誘電エラストマー型人工筋肉の研究開発をこれから始める技術者にとって、手軽に入手でき、かつ、高い信頼性のあるプラットフォームとして利用できる。実際に、ELASTOSIL ® FILMを利用して、誘電エラストマー型人工筋肉の量産が研究されている 1), 2) 。
また、旭化成ワッカーシリコーンでは、誘電エラストマー型人工筋肉に必須である、電極作成に対するソリューションとして、ELASTOSIL ® FILMに塗布可能な導電性液状シリコーンゴムELASTOSIL ® LR 3162も提供している。
表1.ELASTOSIL ® Filmの代表物性
| 材料 | 付加型シリコーンゴム |
|---|---|
| 膜厚 | 20 μm - 400 μm |
| 硬さ ショアA (DIN ISO 48-4) | 27 |
| 引張強さ (ISO 37 type-1) | 6 MPa |
| 破断伸び (ISO 37 type-1) | 450 % |
| 引裂強さ (ASTM D 624 B) | 10 N/mm |
| ガラス転移点 (Tg) | -126 ℃ |
| 使用可能温度 | -45 ℃ ~ 150 ℃ |
| 圧縮永久ひずみ 22 h/100℃ (ISO 815-B) | 5 % |
| 比誘電率 εr | 2.8 |
| 絶縁破壊強さ (VDE 0303) | 80 - 100 V/μm |
| 体積抵抗率 (IEC 60093) | 1014 Ω・cm |
おわりに
誘電エラストマー型人工筋肉の開発においてELASTOSIL ® FILMは、技術革新と商業化に重要な役割を担っている。このシリコーン薄膜はすでに量産化され、その特性を保証できる段階にある。また、十分な耐久性を有するため、実用化され始めている。
Wacker Chemie AGは、研究開発主導型の世界最大級のシリコーンメーカーである。当社の製品群には、現在、3,000以上のシリコーン製品が取り揃えられており、グローバル展開している各拠点の技術センターでは、顧客の要望に応えるため、必要な技術サポートを提供している。
参考文献:
1) Maas J, Tepel D, Hoff stadt T (2015) Actuator design and automated manufacturing process for DEAP-basedmultilayer stack-actuators. Meccanica 50:2839–2854
2) Hoff stadt T, Maas J (2015) Analytical modeling and optimization of DEAP-based multilayer stack-transducers.Smart Mater Struct 24(9):094001
各製品の詳細情報につきましては、「お問い合わせ一覧」より、お問い合わせください。